

The concept
An exoskeleton is made for people with paraplegia. This is a low spinal cord injury, characterized by the paralysis of the lower part of the body, including the legs and sometimes the lower part of the torso. This condition arises from damage to the spinal cord. This damage leads to a disruption of the signal transmission between the brain and the lower limbs. The degree of impairment varies, depending on the height of the spinal cord injury. The exoskeleton is a robotic suit that takes over the muscle, nerve and bone function of the lower part of the body. The exoskeleton enables someone with paraplegia to
stand up and walk again.
Why an exoskeleton?
Currently, people with paraplegia are confined to wheelchairs for life, resulting in a decrease in both physical and mental health. For example, muscles and bones become weaker and cardiovascular function declines. An exoskeleton creates a larger freedom of movement, resulting in practical benefits for performing daily life tasks. Furthermore, being able to stand on eye level with friends and family is experienced as something with great emotional value. Walking in an exoskeleton also has physical benefits, including significant improvements in bloodflow, bowel and bladder movement, bone structure and muscle strength.







frame = bones
How does it work?




muscles = joints
The journey begins with the input device (IPD) conveniently located on the pilot's crutch. Here, the pilot can choose his desired walking pattern with the press of a single button. This means that he can decide when he for instance wants to walk forward, walk slower or stop the exoskeleton.
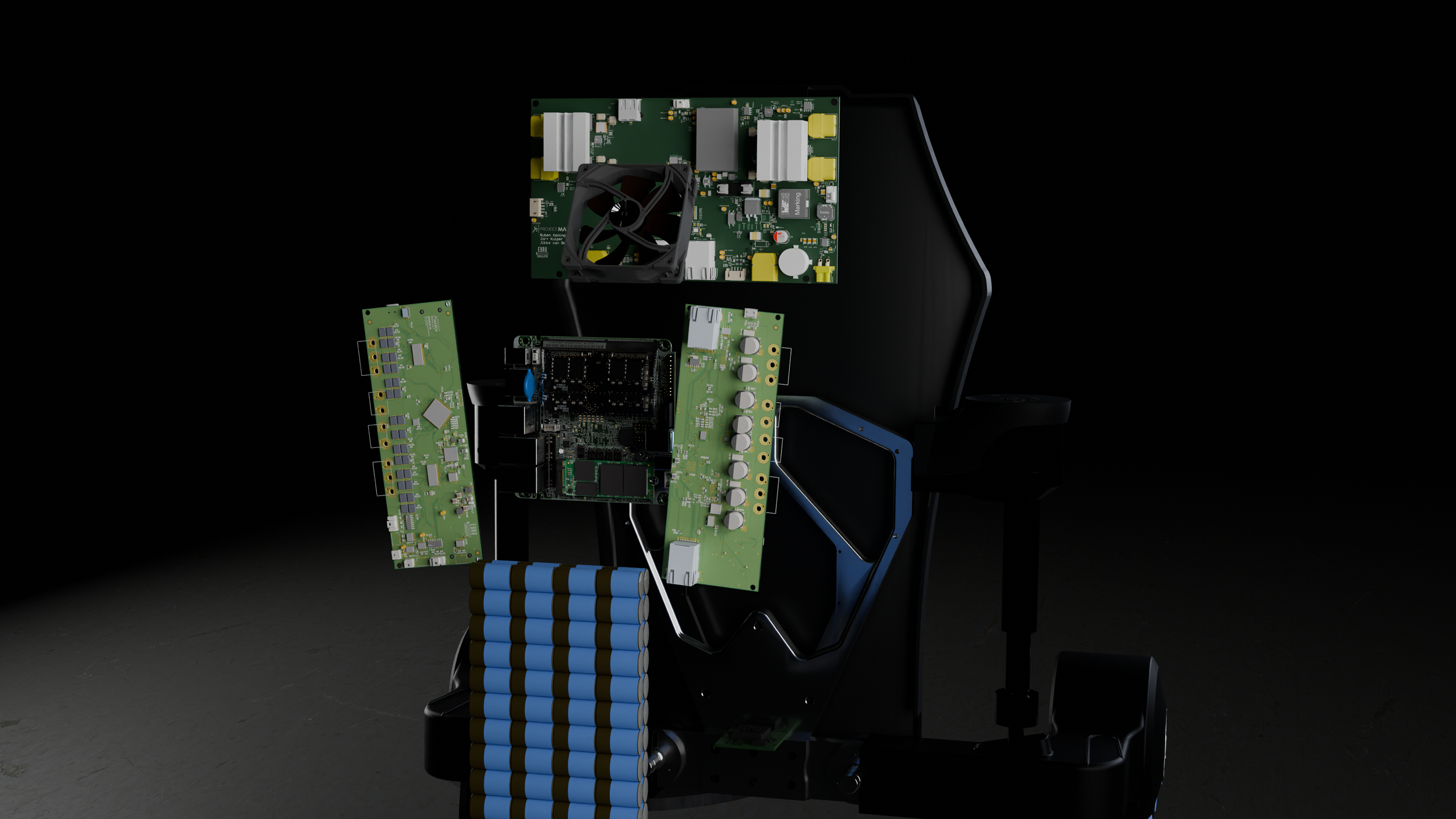
When the pilot selects a walking pattern a signal is sent to the backpack, the central component of the exoskeleton. It houses the critical components that bring the entire system to life. Here, nestled amongst the other technology, lies the power distribution board (PDB).
This crucial component receives energy from the battery and then seamlessly distributes it to each individual component throughout the exoskeleton at the precise level it needs.
Besides the PDB, also the main computer gets a signal from the IPD, which can be seen as the brain of the exoskeleton. The computer calculates the required sequence of movements. Using advanced algorithms and real-time sensor data, it then finds the exact movements needed for each individual joint to execute the walking pattern perfectly.
The signal from the main computer is transmitted to the moving joints through a translator known as the motor controller. This motor controller receives signals from the computer and relays the information to the joints, resulting in their movement.









Pilot experiences

